螺旋槳 2:變距螺旋槳
這次來探討一個在螺旋槳上面佔據相當重要性的主題:螺旋槳的變距。
Figure 1. 可變螺距螺旋 [1]
在前篇 [2] 提到螺旋槳葉片所感受到的氣流角度是變化的。 一片槳葉的每個位置因為與旋轉軸心的距離不同而導致移動速度不同, 然而這點其實相當容易解決,只要把槳葉設計成我們看到的那個扭轉造型就可以了。 真正比較複雜棘手的部份來自於因為螺旋槳的轉速變化、以及飛機飛行速度不同而導致的槳盤迎風氣流速度不同, 這兩項都在變動的氣流流速導致葉片上所感受到的氣流角度時常變化且不易捉摸。 當然我們可以不理會這些問題的存在,並且直到現代也有相當龐大的應用領域就是這麼做的, 如輕航機、遙控模型飛機、和各位家裡的電風扇等等。 只不過這樣的缺點也很明顯,當飛行速度愈來愈快的時候, 螺旋槳的效率就會愈差,愈難以再繼續有效提供推動力,導致難以再繼續提高速度。 為此,人們發明了可以改變槳葉螺距的變距螺旋槳,如上圖(Figure 1)所示。
槳葉角變動範圍
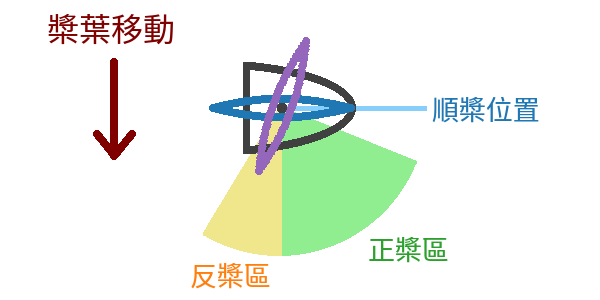
Figure 2. 螺旋槳槳角區間
可變螺距的螺旋槳可以改變槳葉的角度,一般來說槳葉可設置的角度粗略分為三個區間:正槳、反槳、和順槳, 即在上面的示意圖(Figure 2)中分別標示為淺綠、淺黃、和淺藍的範圍。 當然,實際飛機上的螺旋槳可能因為各種設計需求的緣故,其實際能夠使用的區間也許會比上面所示的更少更窄。
先看反槳的情況(如圖 Figure 2 紫色槳葉),此時的槳角很低甚至是負的, 使氣流作用在槳葉上產生的推力不再推動飛機向前,而是將飛機反方向向後拉。 這個作用就像是汽車上的倒退檔,使飛機產生一個向後退的力,在地面機坪上操作飛機向後滑動的時候有用處; 特別是在那種左右都有螺旋槳的飛機上,還能夠做到能讓飛機原地掉頭轉向的動作,用處很大。 當然,在正常飛行的狀態下使用這個檔位就會給飛機和整個動力系統帶來相當大的負擔, 因此許多飛機的操作設計只允許在地面上使用這個檔位。
順槳(如圖 Figure 2 藍色槳)則是將槳角直接拉到擺平(約 90 度),與飛機前進的氣流同向。 這個槳角基本只有一個用途,就是當飛機飛在空中且發動機故障或燃油耗盡而停止運轉的時候。 此時螺旋槳已經完全沒有產生推動動力的作用,而只剩下阻力板的作用, 因此在此情況下將螺旋槳調整至順槳的位置,可以使螺旋槳產生的氣流阻力減少至最低。

Figure 3. 畫面右邊的螺旋槳正好處於順槳狀態 [3]
再來看看在一般平常狀態下最常見的正槳範圍。 槳角可以使用的範圍那麼大,那麼應該在什麼情況下使用怎麼樣的槳角呢? 在下圖(Figure 4)中便示例了三種不同的狀態。 其核心原理就是使槳葉與相對氣流之間維持在最佳攻角上,攻角過大會產生槳葉失速問題, 攻角過小則螺旋槳不能有效產生推力,還可能因為轉矩過小而導致發動機超速運轉! 那麼既然槳葉的相對氣流是由飛機的前進速度也就是航速、加上槳葉自身運動速度也就是螺旋槳轉速所共同影響的, 自然槳角的選擇就會和這兩個速度之間的關係有關。
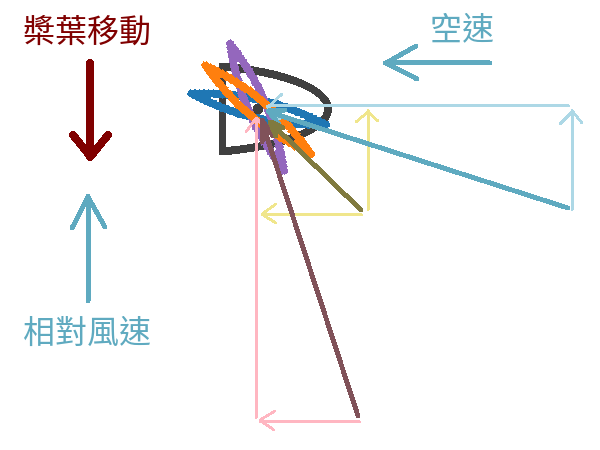
Figure 4. 不同空速和槳葉速度搭配下的槳角
上圖(Figure 4)的橙色槳和藍色槳分別對應相同螺旋槳轉速下處於不同航速的狀況, 當航速高的時候槳角就需要大一點,而航速低的時候槳角則要小一點。 那麼當我想要加點油門給飛機提速的時候呢?上圖橙色槳和紫色槳正好表達了這種情況。 在航速沒變的情況下,我給發動機加力,自然螺旋槳就轉的比較快了,因此這時的槳角便需要調整至比較小的位置; 相反的當欲降低發動機出力而使螺旋槳轉速變慢的時候,槳角便需要往大的方向調整。 總結而言,最佳槳角主要和飛機航速、及螺旋槳轉速二者有關, 當航速高而轉速低時需要大槳角,而當航速低而轉速高時需要小槳角; 至於航速與轉速二者皆高、或者皆低時,則最佳槳角無法簡單的判斷,需要更仔細的計算二者之比例後才能夠決定。
這些調整看似凌亂,槳角、空速、轉速等等彼此都有關係,互相影響, 但其實更加簡單直白的原理,就是在任何狀態下,使槳葉與氣流維持一個不變的攻角! 回顧上圖示意的幾個不同狀態,雖然空速、轉速、和槳角都變來變去,然而槳葉與氣流的攻角卻都是一樣的, 而槳葉角度的手動變更行為其實也是為了使攻角保持一致。 更進一步探討,其實攻角也不一定非要在一個固定的數值上維持不動,而是在一個範圍內都可以使用, 只要攻角不至過大而發生槳葉失速,也不會過小而讓發動機因為負載過低而超速運轉, 就都是可以使用的攻角區間。
上面說到無論狀態如何變化,槳葉的攻角會由人為控制使其大致維持在固定的數值上, 但在此大條件之下其實攻角還是存在一個可以變化的浮動範圍。 如果攻角偏高,甚至處在接近槳葉失速的邊緣, 則此時雖然看似槳葉的升力大,但阻力同樣也大, 因此轉軸扭矩大,發動機負載高,轉速自然會偏低; 總和起來推力反而偏低,但發動機輸出功率同樣偏低, 總體動力系統的運作效率比較高 (類似原理解釋可參 閱往期內容 [4]), 更白話來說就是省油。 相對的如果讓槳葉攻角偏低,此時看似槳葉的升力係數也偏低, 但是因為扭矩小,發動機負載低,自然轉速會升高,反而能夠產生更多的升力(推力); 也就是說雖然效率降低也更耗油了,但是卻更能夠壓榨發動機的馬力輸出 (亦可參閱 往期內容 [5])!
總結對於槳角的調整目標, 首要任務是確保在任何空速和轉速之下,讓葉片氣流攻角都處在可以正常工作的範圍, 不會讓槳葉發生失速,也不會使發動機超速運轉。 在確保槳葉處在上述的可工作範圍區間下,次要任務則是依據當下對動力的需求調整使攻角偏高或偏低。 攻角偏高則動力系統效率高,適合巡航等狀態使用; 攻角偏低則系統效率差但可爆發更多動力輸出,適合需要短時間加速的場合使用。 也許至此許多汽車駕駛已經發現了,螺旋槳槳角也就是槳距的調整,其地位即類似於汽車上的排檔變速機構。 低速時使用低速檔(小槳距),高速時使用高速檔(大槳距); 需要臨時加大動力提速時需要降檔(偏低調整槳距),要省油巡航時則使用高速檔(偏高調整槳距)。
恆速螺旋槳
理論上來說,能夠動手改變螺旋槳的槳角(或稱槳距、螺距), 就已經足夠應付各種不同發動機轉速和飛行速度下的各種狀況了, 只是這樣的操作需求在實際的飛行中卻給飛行員帶來不小的操作負擔。 因為飛行員必須要隨時關注空速(也就是飛行速度)和發動機轉速,並且立刻做出對槳距的調整行為。 然而空速和轉速是時刻都在變化的,因此槳距的調整也同樣需要一刻不能停的調整; 並且調整槳距的行為本身也同樣會導致轉速發生變化,因此調整槳距的整個行為其實頗有複雜度。 如果說飛行員沒有別的事情幹而只需要做槳距調整這件事的話,那倒也不是什麼大事, 但是偏偏飛在天上要操作的東西、和要注意的東西還有很多別的, 那麼調整槳距的這件事情就會導致飛行員相當大的壓力。 但是在上一節的內容已經說明過了,這些變來變去的調整最終其實就是要讓槳葉攻角維持不變罷了。 那麼如果能夠發明一個什麼機構能夠依據氣流狀況自動改變槳葉角度, 是不是就可以在槳距這件事情上減輕飛行員的操作負擔呢? 是的,事情的確是這樣,並且也確實存在一個作用與這個目的相當接近的設計, 這就是:恆速螺旋槳。
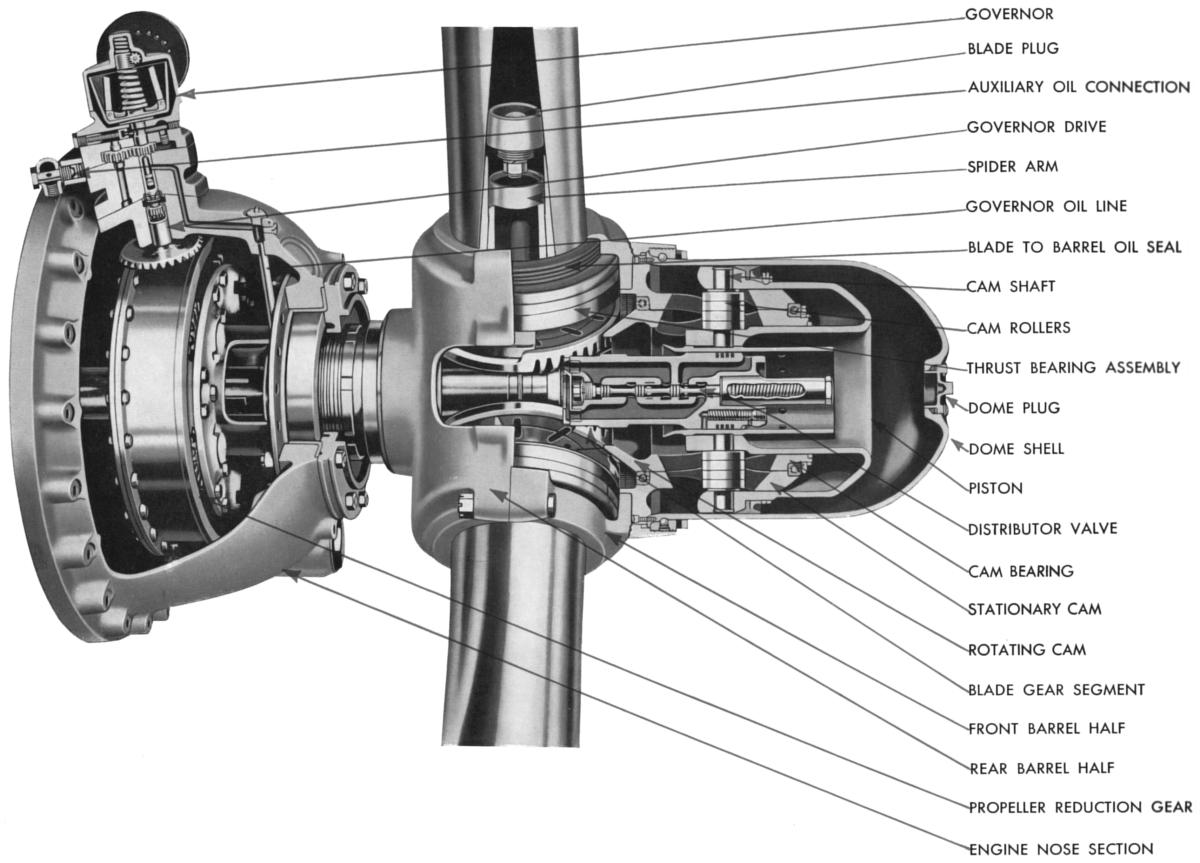
Figure 5. 恆速螺旋槳結構 [3]
恆速螺旋槳顧名思義,就是能自動保持螺旋槳維持在一個固定轉速的裝置。 螺旋槳在旋轉的時候會驅動圖中(Figure 5)標示為 Governor Drive 的齒輪, 驅動著上方標示為 Governor 的離心飛錘。 飛錘轉速高於需求的時候便會因為離心力而向外張開,反之在轉速不夠的時候就會因彈簧的力道而向內收縮。 螺旋槳的液壓機構(或可能有些設計比較喜歡使用齒輪而非液壓,但原理是一樣的)便能依飛錘的狀態去調整螺旋槳槳距。 當偵測到螺旋槳轉速高於所設定的目標轉速時,便會自動增加槳距以降低轉速; 相反當偵測到螺旋槳轉速低於目標轉速時,便會自動減少槳距以增加轉速, 最終使螺旋槳趨向於維持在所設定的轉速上固定不變。
恆速螺旋槳大約是在兩次世界大戰中間的時期被發明出來,很快就流行在所有的螺旋槳飛機上, 直到現在所有的飛機螺旋槳但凡能夠變距的,基本用的全都是恆速螺旋槳。 在螺旋槳恆速的作用下,無論飛機爬升或下降,飛行速度或快或慢, 螺旋槳都能夠自己自動調整槳距,使槳葉與氣流的攻角隨時處在近似定值的狀態。
不過雖然螺旋槳恆速的設計使得槳角可以隨空速而自行調整匹配, 但是另一方面,它卻不能夠自行匹配發動機的功率狀態。 什麼意思呢?比如說當下整個螺旋槳的狀態都很好,但是我想要加速,於是推了油門, 這時會發生什麼事? 發動機的輸出功率變大了,槳軸扭矩輸出變大了,於是螺旋槳轉速自然會變快。 這時為了使螺旋槳轉速不變,於是恆速機構自動調整,就會把槳角拉高。 於是槳葉的攻角就會變大,過量的話甚至能導致槳葉失速! 那麼如果我不是要加速而是要減速,收了油門,這時又會怎麼樣呢? 這時發動機輸出功率變小,槳軸扭矩輸出變小,螺旋槳轉速會變慢。 這時為了使螺旋槳轉速不變,於是恆速機構會降低槳角。 於是槳葉攻角會變小,使螺旋槳工作效率降低! 也就是說,恆速螺旋槳雖然可以自動針對空速的變化而自適應調整槳距, 但卻無法妥善處理因為發動機功率變化而需要的調整。 當飛行員改變發動機功率輸出,也就是變更了油門的位置時, 也會需要將恆速螺旋槳的轉速設定一併調整變更。 按照前面對恆速螺旋槳和發動機功率之間所產生問題的推導, 可以知道當油門增大的時候,會需要同樣調升螺旋槳的轉速設定,以繼續維持槳葉攻角仍處在良好位置; 相對當油門減小的時候,也同樣需要調降螺旋槳的轉速設定。
雖然說螺旋槳恆速的這個機制並不能夠完全免除飛行員對螺旋槳的控制, 但其自動化程度已經能相當大幅度的減輕操控負擔。 一般飛行時的通常情況下並不需要去做刻意調整介入,只有在變更油門位置的時候才需要一併調整。 並且絕大多數時候下,螺距調整桿和節流閥(油門)桿是同進同退的, 意思就是油門往前推的時候,槳距桿也同樣往前推; 油門往後收的時候,槳距桿也同樣往後收,兩桿子幾乎總是處於同樣的位置 (當然有的時候可能為了短時間得到更多動力,螺旋槳桿會比油門桿更往前些推)。 因此雖然仍然免除不了需要去控制螺旋槳螺距,但是控制的對應關係已經大幅度的單純、簡單化了, 相比於沒有定轉速的機構而需要飛行員時刻關注空速和轉速,並且持續微調槳距的情況而言, 自動化程度已是相當高。
Figure 6. 螺旋槳飛機動力控制的經典三根杆,其中本篇重點在於中間的螺旋槳控制杆 [6]

Figure 7. P-51 戰鬥機座艙內,圖中圈起標註的地方就是動力控制三杆,其中寫著一個白色「P」的黑頭柄就是螺旋槳控制器 [7]

Figure 8. 一架現代小飛機上面的動力控制三杆,形式或有不同,但操作原理邏輯是一樣的 [8]
上面是幾張飛機上經典的控制發動機的三根杆的圖片 (如果飛機有多個發動機的話,那麼這些杆的數量也會同樣增加,每具發動機對應一副)。 其中左邊黑色的是發動機節流閥也就是油門,右邊紅色的是油氣濃度控制[4], 而位居中間的就是本文的主角:螺旋槳控制器(Propeller Level)。 (油門通常都是黑色的,油氣濃度控制器通常都是紅色的,至於螺旋槳控制杆則不一定什麼顏色。 這當中肯定存在某些歷史緣由,只不過我並不清楚其中的典故,而如果有懂行的讀者可以寫信來告訴我。) 注意中間控制螺旋槳的杆並不是槳距控制杆(Propeller Pitch Controller), 因為現在基本所有的飛機都配置了恆速螺旋槳,所以那東西並不直接控制槳距, 而是用來調整前面所謂螺旋槳目標轉速的控制器,因此叫作 Propeller Level Controller, 或有時候直接簡稱為 Propeller Control; 至於中文它叫什麼?也許就姑且稱它為螺旋槳控制器吧!
螺旋槳轉速調控原則
螺旋槳控制器的調控原則是這樣的: 「大致跟隨油門,油門要進則它也要進,油門要退則它通常也要退; 另外它可以比油門推進的更多,但後退時不能比油門更低。」 這項調控原則的前半段應該很容易理解,就如同前面所解釋的槳距調整原理一樣,就是為了匹配發動機功率而已; 而此原則的後半段則可能稍微不那麼能直觀理解,它其實是對於螺旋槳控制裕度原理的反應。
前面講解槳距調適原理時就有提過,槳距其實可以有一個操作的容許範圍,偏高則效率高,偏低則動力強; 高出太多則可能產生槳葉失速的後果,低出太多則可能產生轉速超速的後果。 然而在恆速機制涉入的情況下,基本無需考慮超速運轉的情況, 如果螺旋槳真要超轉的話,恆速機制會自動拉高槳距把轉速降下來, 因此通常會直接造成比較嚴重後果的是轉速過低的情況! 當發動機處在較高油門的工作狀態,功率的輸出較強,很自然的會讓螺旋槳轉的更快, 而此時過低的螺旋槳轉速設定,會使恆速機制因為欲降低轉速而過度拉高槳距, 便容易發生槳葉失速的問題! 於是這就最終產生了「螺旋槳控制杆只能在油門前面,不能落在油門後面」這樣的操作原則, 而同樣也是當欲調整油門位置時, 「推油門前應先推進螺旋槳杆再進油門,收油門時應先退油門後再退螺旋槳杆」這句操作原則的原理。
已經說了這麼多調整原理,那麼為什麼我們一定要維持槳角、槳距、或轉速在範圍內呢? 若槳距或轉速落在容許範圍外面,會發生什麼樣可能的後果呢? 當螺旋槳設定轉速過低,也就是槳距過大、攻角過高,則可能發生槳葉失速的現象。 回顧機翼升力原理[9], 當槳葉失速時,氣流會在槳葉背面產生迴流區, 這些渦流除了會產生更大的螺旋槳轉動阻力之外,不穩定的渦流也會導致槳葉振動和受力不均, 可能造成槳葉損壞或壽命降低。 即便沒有到發生槳葉失速的程度,螺旋槳過高的旋轉阻力會導致發動機負載過大, 如果這時發動機還處於較低油門的工作狀態的話,就容易造成發動機損壞或壽命降低。 這種情況就好比是汽車使用高檔位低速駕駛,或使用三檔起步那樣; 省油、效率高是真的沒錯,但車子容易壞也是真的!
另一方面,如果轉速過高……, 或者說恆速螺旋槳可能沒有轉速過高的問題,但仍有發動機溫度過高的問題! 一般來說除了啟動和暖機的階段之外,通常只有在短時間需要大功率的時候會暫時性的拉高螺旋槳轉速, 就好像汽車暫時降檔提速那樣,一般這種操作不會維持太久。 一方面是因為此時工況效率差、耗油, 另一方面也是因為發動機處在低負載、高轉速的狀態下,容易導致溫度過高的結果。 這就和把汽車打在三檔開在高速公路上的情況是一樣的。 如果說此時飛機速度很快,散熱條件好的話那可能倒還好, 但是若航速不高就可能會有引擎過熱的風險, 特別是對於氣冷式發動機而言[10]! 這就是為什麼許多採用氣冷發動機的飛機,在起飛爬升時會被要求不能夠全速運轉, 並且要求飛行員時刻注意發動機溫度的緣由了。
為什麼要控制螺旋槳轉速,而不直接控制槳葉攻角呢?
經過前面對螺旋槳恆速機制的說明介紹後,不知道有沒有人會產生一個問題? 為什麼我們要設計一個機制去偵測並維持螺旋槳的轉速,而不是去偵測並維持螺旋槳槳葉的攻角呢? 你看這恆速螺旋槳時時檢測螺旋槳的轉速,然後透過時時調整槳葉角,去維繫轉速保持在設定的數值, 目的是藉此間接的維持槳葉上氣流的攻角不變。 那麼為什麼我們不偵測槳葉上的氣流攻角,然後調整槳距直接對標維持氣流攻角呢? 這樣不就不存在不同發動機工況下之最佳轉速不同的問題了嗎? 不就連螺旋槳控制杆都可以去掉了嗎? 那為什麼我們不這麼做呢?
沒錯,其實我們真正想要的目的並不是轉速,而是攻角, 並且理想上我們應該直接標定攻角狀態進行控制調整, 然而讓我們轉向取道去標定轉速的真正原因其實來自於現實的問題。 理想終究太美好,然而在現實的工程上我們該如何去測量螺旋槳的攻角呢? 真正導致我們在實務上退而求其次選擇去偵測並控制轉速的原因,其實是因為轉速相對容易測量。 對於測得螺旋槳的轉速, 傳統上只需要使用一個離心調速器[11] (如圖 Figure 9)就可以了, 甚至在現代電子元件科技的加持下,也許更先進的飛機可能使用光學感測器來測量; 但是槳葉上的氣流攻角要怎麼去測量呢? 並且這個測量的方法還得要是在高轉速、大離心力的螺旋槳上面, 可以可靠、穩定、且經濟的測量槳葉攻角的方法! 這就是為什麼最後流傳下來的控制機制不是標定槳葉攻角,而是標定轉速的原因了。 雖然這個方式遺留了一些未能妥善解決的問題,也就是在不同發動機工況下的最適轉速不同的問題, 但對於減輕駕駛員操作負擔的這個目標來說, 其省心程度已經相比讓駕駛員直接調整槳距的原始方式來說提升了一個層次。
Figure 9. 離心調速器 [12]
總結
本篇以螺旋槳槳距調整為核心,講解了調整槳距的目的, 即讓螺旋槳適配氣流的狀態,使槳葉總是處於最佳效果的角度。 在可正常工作的槳角範圍內仍存有可微調的空間,可依據效率優先或馬力優先的需求調整使槳角偏高或偏低, 並且對於槳距的調整機制可以類比為汽車上的排檔變速行為。 除了正槳之外,反槳能使飛機在地面上的操作更加靈活,而順槳則能在空中停車時減少螺旋槳帶來的阻力。 在槳角調整適配的理論原則之後,介紹了已被廣泛大量使用的恆速螺旋槳機制, 它的存在能夠相當大程度的進行自動化控制並解救飛行員於細碎的操作之中。 並且解釋為什麼採用轉速進行間接控制,而非直接針對槳葉攻角進行自動化控制的原因, 是源於對工程現實妥協的結果。
下一篇:「螺旋槳 3:各種奇妙問題」