翼型系列 6:升阻係數
本篇要來說明如何從機翼剖面的幾個係數去計算升力阻力等作用力。
為什麼會隔了這麼多時間後突然更新翼型系列的文章呢? 原來我是沒有計劃寫這篇,本來的翼型系列在寫完第五篇就算完結了。 機翼的各種係數和升阻力等的內容已經偏向計算細節, 對於科普介紹理解的目的來說已經遠超出所需要的知識範圍。 但是最近正在進行螺旋槳系列的寫作,即將要進行一些性能計算分析, 正好就會需要計算葉面的升阻力,就發現還是得先交代一下翼剖面升阻力的計算相關議題。 當然也可以忽略這些不去解釋而直接套用結果計算式, 但是這麼做的話很可能會讓那些除了曾經學習過相關知識的人之外的其他人感到困惑不解, 而如果在螺旋槳篇章裡面去交代這些東西的話又會讓文章過度龐雜, 因此判斷有必要以獨立的主題去交代這些有關的事情。 於是就這麼誕生了翼型系列經過多時之後的新篇主題。
作用力之計算與相關定義
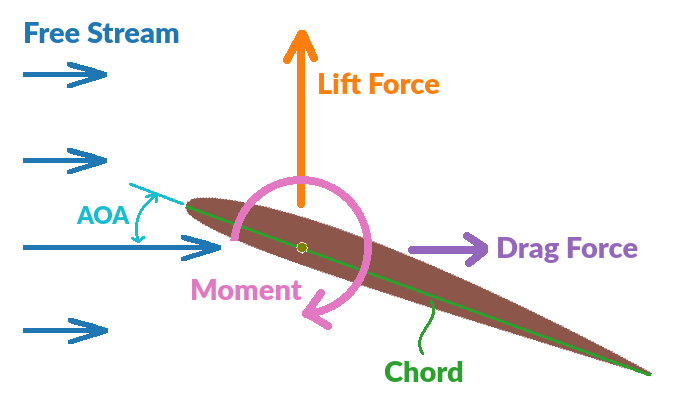
Figure 1. 機翼剖面、氣流與作用力定義
如上圖(Figure 1)所示為一個機翼剖面形狀在氣流中與其所產生作用力之關係圖。 其中剖面形的前緣端點到後緣端點之間的連線叫作「翼弦」(Chord),其長度也就是弦長。 翼弦就是翼剖面形的基線,凡與機翼的尺寸、或與氣流之關係等之描述,皆是以其作為基準。 前方吹來的氣流我們有時候稱為「自由流」(Free Stream),其速度通常即為飛機前進的速度; 而其與翼弦之間的夾角則為「攻角」(Angle of Attack (AOA)),仰頭向上為正,低頭向下為負。 氣流吹過機翼會產生作用力,其垂直於自由流的分量即稱為「升力」(Lift Force), 升力可能為正可能為負,比方機翼負攻角低頭達某個程度的時候,產生的升力就是向下的負升力; 而作用力平行於自由流的分量稱為「阻力」(Drag Force),阻力只能是正的, 至少在目前人類能造出來的實物裡面不可能產生負阻力的狀況。
最後就是力矩的部份,氣流吹過機翼時不只產生作用力,還產生了作用力矩(Moment), 在一般通常的常見情況下產生的是使機翼低頭扭轉的力矩; 但是上圖力矩的方向怎麼畫反了呢?!那不是畫反了,而是因為定義的關係! 因為攻角定義仰首方向為正,因此力矩的方向也就同樣定義以仰首為正了, 否則力矩和攻角的定義會互相衝突。 這就是為什麼下面我們將要看到的一堆力矩係數基本全都是負值的原因了! 另外,既然提到力矩那就不能不交代其之基準中心點。 一般情況下我們定義機翼上各種力與力矩作用的中心點,是在翼弦上的前方四分之一位置處, 這個地方稱為「氣動中心」(Aerodynamic Centre (AC)); 至於為什麼氣動中心定義在這裡,而不是定義在力矩為零的整體作用力中心上? 這個後面再談。
知道了翼型剖面相關的定義之後,我們要如何計算各種作用力的大小呢? 這時候我們還需要知道幾個係數,也就是 「升力係數」(Lift Coefficient (\(C_l\)))、 「阻力係數」(Drag Coefficient (\(C_d\)))、和 「力矩係數」(Mement Coefficient (\(C_m\)))。 其實詳細來說這不是三「個」係數,而是三張圖表,你從哪裡取得的翼型資料通常會有這些數據; 而如果沒有的話,恐怕就得自己做實驗來得到了! 有了係數之後,其對應的力和力矩就能通過下列的計算式算得:
\[ L = \frac{1}{2} \rho V^2 S C_l \] \[ D = \frac{1}{2} \rho V^2 S C_d \] \[ M = \frac{1}{2} \rho V^2 S c C_m \]
其中:
\(L\) 為總升力;
\(D\) 為總阻力;
\(M\) 為總力矩;
\(\rho\) 為空氣密度;
\(V\) 為自由流速度;
\(S\) 為機翼投影面積;
\(c\) 為翼弦長。
其實其中的那個 \( \frac{1}{2} \rho V^2 \) 在空氣動力學上面就是動壓, 若以 Q 表示動壓的話,那麼上面的計算式還能寫的更為簡潔:
\[ L = Q S C_l \] \[ D = Q S C_d \] \[ M = Q S c C_m \]
不過實際上其實並沒有看上去那麼簡單單純。 前面有說到,這其實不是三個係數而是三個係數表, 這些係數實際上會隨著攻角(AOA)的變化而不同。 此外機翼在不同的雷諾數 (Reynolds Number [1]) 下的係數表也有所不同, 不過本篇我並不想展開解釋關於雷諾數的部份,那也不是三言兩語能說得清的, 如果讀者不知道什麼是雷諾數的話,可以姑且理解為就是自由氣流的速度 (至少在我們所專注的應用裡,雷諾數與其它參數的影響關聯較小些)。 所以粗淺來說,我們可以簡化理解為某個機翼剖面形的這些係數只會與攻角產生對應關係!

Figure 2. 矩型機翼的尺寸與面積 [2]
上圖(Figure 2)就是一架採用矩形翼的小飛機,我們可以清楚的看到它的剖面形狀。 我們所說的機翼面積一般就是指機翼的平面投影形狀的面積, 以上圖的矩形翼來說那就是翼剖面弦長(Chord)乘上翼展寬度(Span)的結果, 計算出來的這個面積就是在前面算式中需要代入的機翼投影面積,簡稱機翼面積。
當然對矩形翼來說是如此簡單,但如果其它要計算的飛機它的機翼沒有這麼中規中矩呢? 比方說梯形翼、三角翼、橢圓翼,還有現代很多難以描述的融合形狀? 對於這些機翼形狀比較奔放的飛機來說, 我們就需要找到一個可以代表整片機翼綜和結果的「平均翼弦」; 至於這個平均翼弦該如何計算如何找? 甚至於如果機翼端部是一個剖面形,根部又是另一個剖面形, 從頭到尾用的不是同一個翼剖面又該怎麼計算? 這就已經超出本篇專注的範圍之外了,就不深入探討細節。 況且實際上的三維機翼計算還不是這麼簡單乘上面積就完事了, 因為你還得考慮 翼尖誘導渦旋氣流 [3] 所造成的升阻力消長。 因此本篇的重點還是放在二維空間上專注對於翼剖面形的計算。
實際案例與分析
前面已經交代了翼剖面三係數與作用力的計算,但是這三係數怎麼來的呢? 正常來說對於任何一個翼剖面形丟給你,你得去做實驗才能得到這些係數的圖表, 好在有些機構有公開發佈一些翼型的實驗結果, 使我們可以不用真的造模型出來去吹風洞就能直接取用現成的資料。 其中最為著名的大概就是美國 NACA (也就是家喻戶曉的 NASA 機構的前身) 公佈了許多該機構研究的翼型的資料,包括翼型幾何形狀以及實驗結果等。 這大概就是為什麼許多自製飛機等用途大多愛用 NACA 幾號幾號翼型的原因吧! 同樣基於不想自己動手做實驗的原因,本篇也就直接挑選了 NACA 系列翼型來作為分析按例。 本篇所使用的翼型資料以及實驗圖表等都擷取自 1945 年出版的「Summary of Airfoil Data」 [4] 這份報告,有需要深入研究的讀者可以自行前往下載。
本篇所挑選的主要翼型型號是 NACA 2412, 一款中規中矩的翼型,它的長相就像下圖(Figure 3)那樣, 此外還有一些其它作為對比的翼型長相如另一張圖(Figure 4)所示。

Figure 3. NACA 2412 翼剖面型
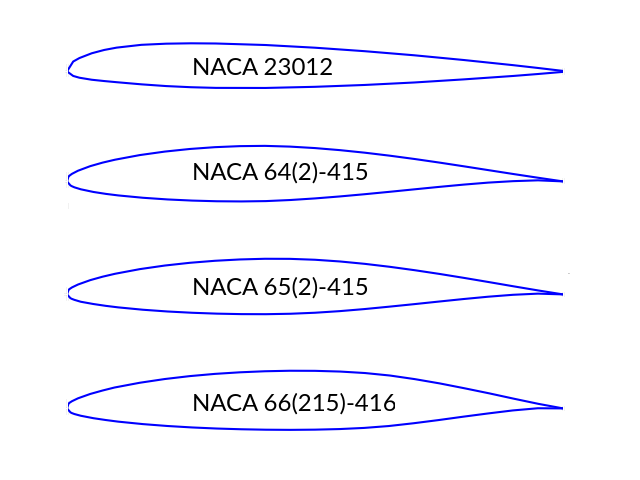
Figure 4. 作為對比的數款 NACA 翼剖面型
升力係數
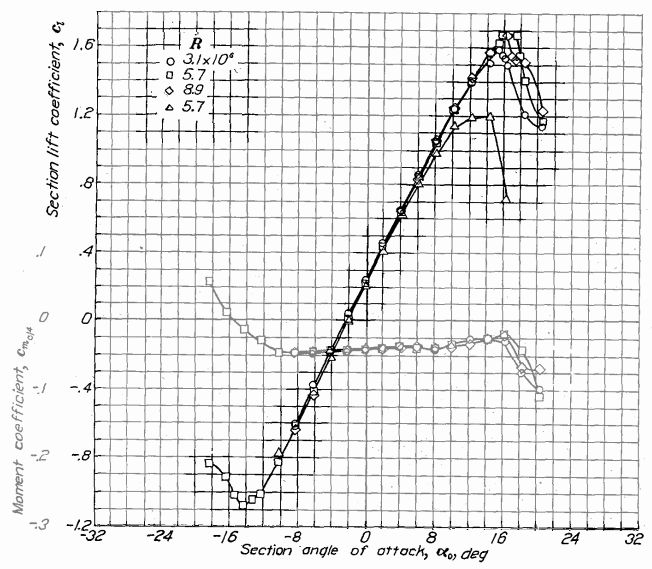
Figure 5. NACA 2412 升力係數圖表
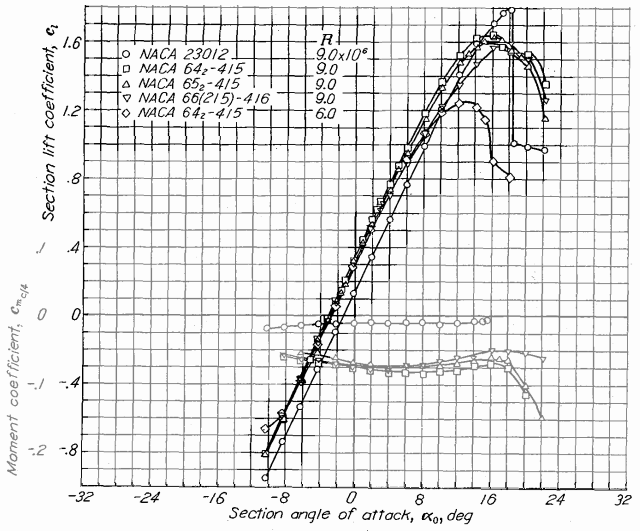
Figure 6. 其它幾款翼型升力係數圖表
上圖(Figure 5)就是 NACA 2412 的升力係數圖表, 另外一張(Figure 6)則是可作為比較對比的,其它幾種翼型的升力係數圖表。 (參考文件裡面收錄了大量翼型的實驗資料, 所以可能是由於節省版面的原因,原圖將升力係數與力矩係數畫在同一張圖表裡。 為了讓沒有接觸過相關領域的人不會被它混亂的內容所迷惑, 我做了一些淡出處理,使讀者可以一眼看出應該要聚焦或可以忽略的部份。)
可以看到升力係數與攻角之間基本就是呈線性關係, 在攻角高到一定程度的地方升力係數會掉下來,那是因為氣流已經分離(失速)了, 這點以前有解釋過 [5] 。 同樣的,低頭(負攻角)到一定程度也會發生失速, 於是在那裡也同樣產生了一個升力係數線圖的回凹現象 (對比的那張圖則沒有將實驗數據覆蓋到負攻角失速的區間)。
長相不同的翼型們升力係數的表現似乎都是驅同的, 較大的差別只在失速攻角的不同,以及升力線彼此之間有一段距離的平移關係。 這是因為機翼主要就是通過折轉自由氣流來產生升力的原理 [6] , 這就是為什麼升力與攻角呈線性關係(在氣流不分離的相對小範圍內)的主要原因, 也因此不同形狀的翼型之間在此作用上沒有太多根本性的差別。 不同翼型之間的差異主要體現在氣流的流暢性上面, 也就是在阻力的表現上,以及所導致的失速攻角不同,失速緩和程度不同的表現上; 至於在正常攻角範圍內的升力表現則不會有太大的差別。
因此當我們說「某些翼型適合低速使用,在低速下能產生更多升力」時, 這個描述其實並不是嚴格正確,因為各種翼型的升力係數趨勢基本是一樣的! 嚴格正確的解釋應該是說某些翼型 可以容許更高的攻角(當然這時得從理論的零升力基準開始算)使用而不失速, 所以所謂能產生更大升力的本質其實來自於更大的邏輯攻角。
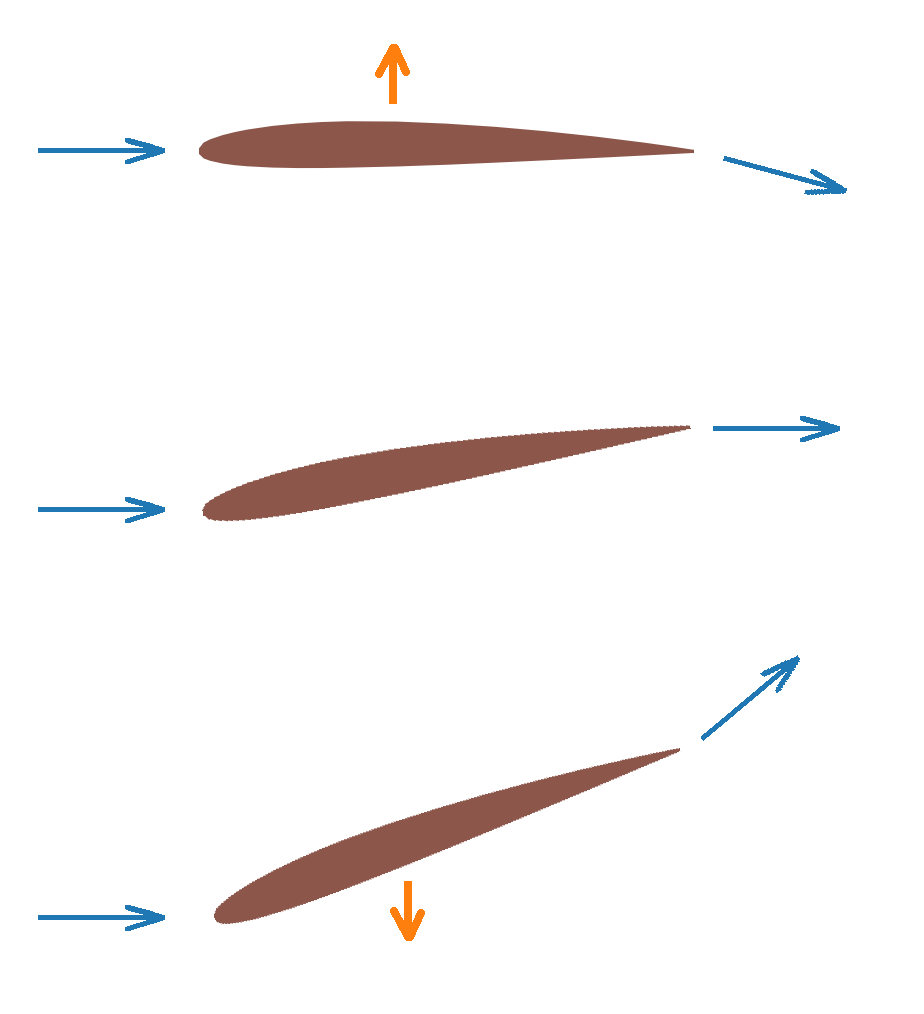
Figure 7. 帶弧翼型在某個負攻角時產生零升力,該攻角即為「零升力攻角」
不同翼型之間的升力線段還呈現出平移的差異,這主要是因為翼型的彎曲度所造成的。 機翼產生升力的根本原理是由於折轉了自由流所產生的反力,這個反力與偏折氣流的角度成正比。 而翼型的彎曲度就相當於給氣流偏折的效果,雖然零攻角的時候翼型看上去是平擺著的, 然而因為彎曲弧的存在,氣流吹過之後就會因此產生偏折 [6]。 也就是說這個彎曲弧相當於已經給了一個基準的氣流偏角, 要使機翼不產生側向力(升力),也就是整體不偏折自由流, 則機翼應當低頭到某一個角度才會產生這樣的結果(如上圖 Figure 7 所示意)。 也就是說,其實那個不產生升力的角度才是理論上的基準狀態, 也就是純理想的零攻角理論上應該是這種狀態; 但是現實上因為我們定義的攻角是翼弦與自由流的夾角,而非零升力基準線與自由流夾角, 因此這兩者之間就自然存在一個偏移量。 這就是導致不同翼型之間升力線段彼此可能存在一個攻角偏移量的原因。
既然從實驗數據中知道升力與攻角呈線性關係, 至少在未達或甚至未接近失速時的「正常工作攻角區間」內是如此, 那麼在許多的計算用途中,我們就可以將升力係數簡化為下列關係式:
\[ C_l = {C_l}_\alpha ( \alpha - {{\alpha_C}_l}_0 ) \]
其中(前面已經解試過的相同符號就不再重複解釋):
\(\alpha\) 為攻角;
\({{\alpha_C}_l}_0\) 即是「零升力攻角」(Zero Lift AOA),就是在此攻角下產生之升力為零;
\({C_l}_α\) 為一個比例常數。
既然都已經有了確實的實驗數據了, 為什麼我們還要弄出一個既不完全準確,還只能在有限的操作攻角內有效的關係式出來呢? 這有兩個好處,首先是整理歸納出來的關係式可以讓我們從更加直觀的角度閱讀數值之間的關係; 再來則是在許多數學方程的解算中,一條關係算式肯定是比一個查表表格更加好用的多!
阻力係數
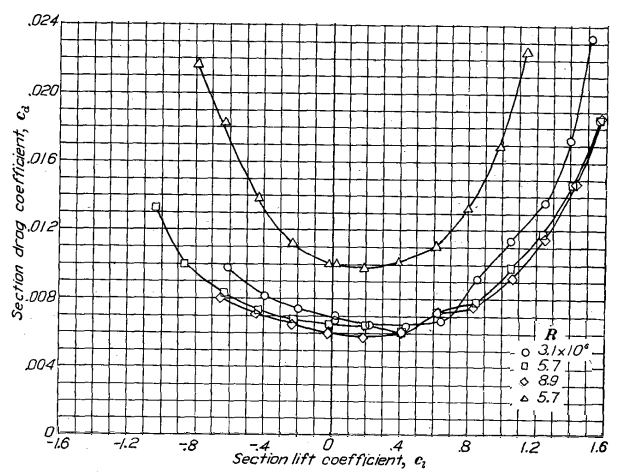
Figure 8. NACA 2412 阻力係數圖表
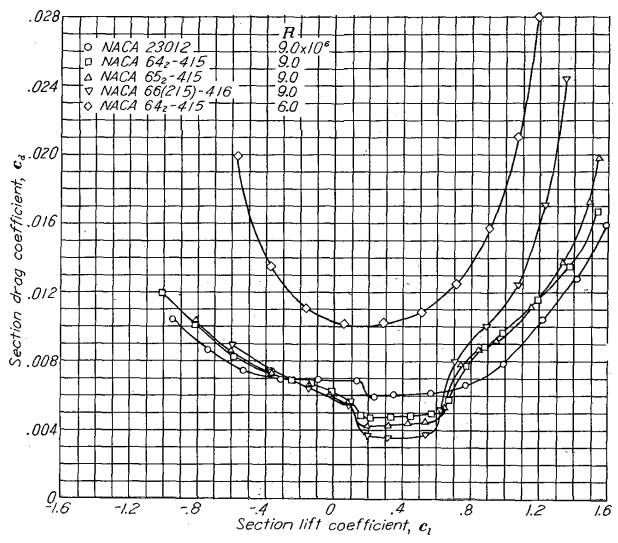
Figure 9. 其它幾款翼型阻力係數圖表
上圖(Figure 8)是 NACA 2412 的阻力係數圖表, 以及另外一張圖(Figure 9)是數種翼型的阻力係數圖表作為比較使用。 相較於不同翼型在升力表現上驅同,在阻力的表現則有些百花齊放了。 原因就如同前面在升力係數部份所解釋的內容, 不同形狀的翼型主要差異在於氣流的流暢度不同,因此就全體現在阻力上了! 並且不只是形狀的不同能導致阻力表現上的差異,連不同的雷諾數都能導致阻力的表現產生出相當大的差異。
其實在人類向天空探索的早期,對於飛行器的設計是大量借鑑(抄襲)了已經飛的很好的資優同學:鳥類, 其中就包括了機翼剖面的形狀基本也是從抄襲模仿開始。 這個現象一直延續到大約萊特兄弟的時代,才漸漸被更加科學的研究成果所更新。 當時的人們在試驗中發現這個機翼的效果怎麼並不怎麼好啊?! 明明鳥類經過億萬年的演化,這個形狀應該是就最高效最優秀的(事實上也真的是), 可怎麼放到飛機上卻完全不是這麼回事? 喔,原來是因為雷諾數差距太大了啊! 人類自己建造的飛機,無論在體型大小上或是在飛行速度上,都和常見的鳥類差距頗大, 也因此導致原本經過億萬年千錘百鍊的最佳造型突然換個地方就效果差強人意的結果。 這就是為什麼現代飛機機翼的剖面形狀和鳥類的翼剖面形狀差別相當大的主要原因了!
回到圖表來, 注意上面的圖表是呈現升力係數對應阻力係數的關係,而非攻角對應阻力係數的關係, 主要因素應該也是因為那份報告因為版面的因素而將圖表給合併了, 而我也沒有大費周章去修改這份圖表。 不過也正好因為這樣的圖表佈局,可以讓我們清楚的觀察到翼型的阻力與升力成高度關聯性。 與升力係數關係式類同,人們也歸整出了阻力係數的關係式:
\[ C_d = {C_d}_0 + k C_l^2 \]
其中:
\({C_d}_0\) 就是在零升力狀態下的阻力,也就是該翼型的最小基礎阻力;而
\(k\) 為一個比例常數。
力矩係數
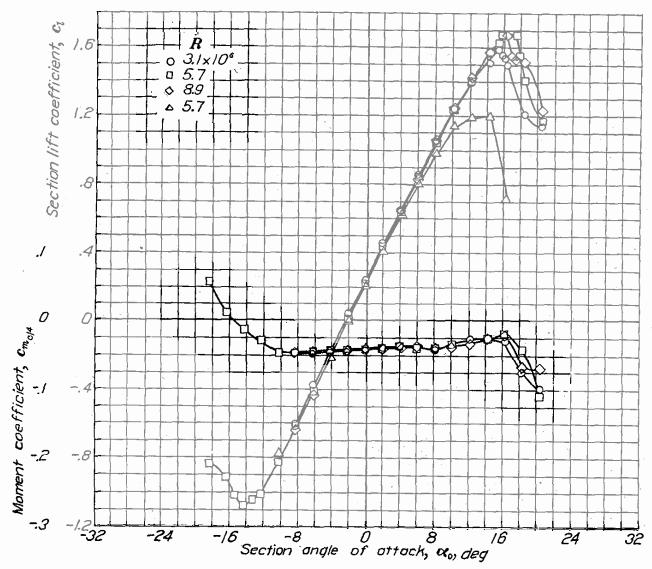
Figure 10. NACA 2412 力矩係數圖表
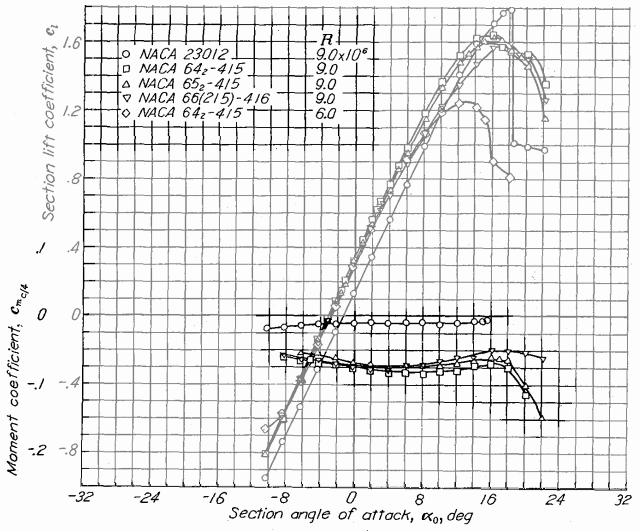
Figure 11. 其它幾款翼型力矩係數圖表
上面同樣也是 NACA 2412 的力矩係數圖表(Figure 10), 和其它數種翼型的力矩係數圖表(Figure 11)。 翼剖面上的力矩主要是因為翼型的彎曲弧度所造成的。 氣流因為翼弧的緣故被機翼給繞著甩了一下畫了個弧,因此反作用力就形成了在機翼上的這個力矩。 如果機翼的上下表面是對稱的,那兩邊畫的這個弧造成的力矩就可以彼此對削掉, 所以對稱翼的力矩係數通常就在零左右。
另外一種說法是說, 在機翼上的綜和合力施力中心其實一般不在我們所定義的支點中心(也就是翼弦的前方 25% 位置處)上, 因此在存在力臂的情況下自然導致產生一個轉動力矩。 這個說法也不能說不對,如果這樣能比較容易想像的話倒也是可以這麼理解 (;只不過實際照這想法分析計算的話,會在帶弧機翼的負升力情況下得到令人匪夷所思的現象, 有興趣的讀者可以自己嘗試看看,很好玩的!) 但是借用這個思路,也能夠解釋為什麼一般都將升力中心設定在翼弦前段四分之一的位置上。 因為將參考支點放在這個位置的話,會發現無論攻角怎麼變化(當然還是得在「正常操作區間範圍」內), 那麼這個力矩就幾乎是無變化的,也就是力矩與攻角無關,力矩係數基本會是個常數。 這個現象可太重要了,否則若我們將支點中心定義在其它位置上的話, 那麼在後續各種計算上需要參考計算的項目就會更多,會讓計算分析更加複雜! 而將支點定義在這個巧妙的位置上,在許多計算分析上就可以將力矩假設為常數, 或甚至在有些情況下可以不用考慮它的存在!
因此這個翼弦前方四分之一的位置,就被我們定義為「氣動中心」(Aerodynamic Centre (AC)), 是在進行飛機設計或其它各種計算分析時,我們所假定的作用力中心位置。 比照升力係數與阻力係數,我們也來歸納個力矩係數的關係式。 不過既然力矩不會隨攻角變化,因此其實力矩係數就是個常數:
\[ C_m = const. \]
最後補充一些小內容。 其實實際製造的各種奇形怪狀翼型畢竟與純理論相較還是存在許多流場上的細節差異, 因此若讀者有仔細閱讀本篇所參考的那份報告的話(至於本篇內文的圖表就沒有探討這麼細了), 就會發現其實每一個翼型的真實氣動中心位置是不一樣的, 連同個翼型在不同雷諾數下的氣動中心位置都有差異! 而那份文件其實都有分別做出兩個不同參考位置的力矩係數圖表, 一個以四分之一翼弦為中心,一個以實際的氣動中心為中心; 只不過兩圖表之間數據機本沒什麼起眼的差距。 這告訴我們其實嚴格意義上的氣動中心和我們一般所簡單定義的四分之一弦位置並不相同, 並且氣動中心的位置其實在不同條件下是會變化的; 不過因為這兩者之間的差異實在真不是很大,因此一般通常簡單起見, 人們大多還是直接假定四分之一翼弦位置處大約就是氣動中心所在位置。
延伸上面的補充內容,氣動中心其實在不同的情況下是會移動的, 只不過通常這個變化太小,因此一般會直接忽略這方面的影響。 但是有的時候這個移動量會相當大,以致人們無法忽略! 比方在超音速情況下,氣動中心的位置就會在大約 50% 翼弦的位置,也就是翼弦的中央。 這個巨大且無法忽略的變化, 導致那些能夠超音速飛行的飛機往往會需要在姿態穩定和姿態控制上面下比較多功夫, 因為次音速飛行和超音速飛行時的平衡位置存在相當大的差距。
為什麼要係數化?
不知有沒有讀者存在這樣的疑問: 為什麼要使用係數呢?直接告訴我們機翼的升力多少、阻力多少,這樣不簡單純粹嗎? 看升力係數多少、阻力係數多少,好像不符合一般人的直覺,倒不如直接告訴你升力多少牛、阻力多少牛; 甚至於可能更多一般人熟悉的力單位也不是牛,而是公斤或噸。 反正做實驗直接量出來的肯定也是力的大小,還要轉換計算一下才會變成係數, 然後使用的人也同樣要轉換計算回來才會變成力。 那麼使用係數的意義何在呢?為什麼科研領域都喜歡告訴你係數呢?
直接使用最終的力大小(或者最原始的力大小),感覺好像比較直覺簡單,然而實際上其實比較複雜干擾! 怎麼說呢?因為具體力的大小和太多因素有關了! 比方說你要造一架飛機,看上的那個翼型有升力 100 牛,可是你的飛機需要 1000 牛, 那麼你的機翼得造多大?是不是得先看看那個翼型在測試的時候用的是多大的機翼再轉換計算一下? 這還是已經選定了翼型的情況下,要是還沒選定翼型呢? A 翼型 50 牛、B 翼型 100 牛、C 翼型 10 牛,但是最後可能是 A 翼型用在你的飛機上升力最大! 啊?因為三個翼型在試驗的時候可能用的面積不一樣、或者風洞吹的風速可能也不一樣。 或者你朋友說他造了一個翼型比你現在用的升力數字更大,結果你拿來用之後卻發現結果並沒有比原本用的更好, 才發現原來你朋友是放在水裡面測試的,水的密度大那當然作用力也大了!
所以其實可能和很多非工程學界的人想像的不同,係數化的意義其實就是在進行純粹化,降低複雜度。 係數化(或者更有學問叫作「無因次化」)的目的就是排除其它非關鍵參數的具體量值,而只凸顯那最關鍵的特徵。 你會發現在上面那些計算式和實驗數據圖表之下, 各係數的差異與具體的空氣流速、空氣密度、和翼面積大小等沒有關係,而只與翼型的「形狀」有關係; 也就是係數之間的比較能夠單純顯示出不同形狀設計之間的性能優劣,而最大程度排除其它不相干的因子。 至於具體應用上能產生多少力?把你的實際應用條件套進去一算就知道了!
下一篇:「螺旋槳 6:性能計算」